Autonomous Robot Design
Autonomous Airport Cleaning Robot

Overview
Rush is a tailored and reliable cleaning support robot designed for the service industry, specifically targeting the dynamic cleaning and sanitation challenges in high-traffic areas such as airports. It ensures contactless and secure experiences for consumers.
As the design lead, I ensured continuous communication with engineers for configuration brainstorming and housing design guidance. I emphasized service design by establishing a robust UX foundation that informed housing design and feature decision-making, ensuring Rush meets the specific needs of high-traffic environments. Additionally, I maintained consistent communication with vendors for manufacturing, ensuring the design intent was effectively translated into the final product.
My Role
Industrial DesignerI Samsung SRA, Think Tank Team
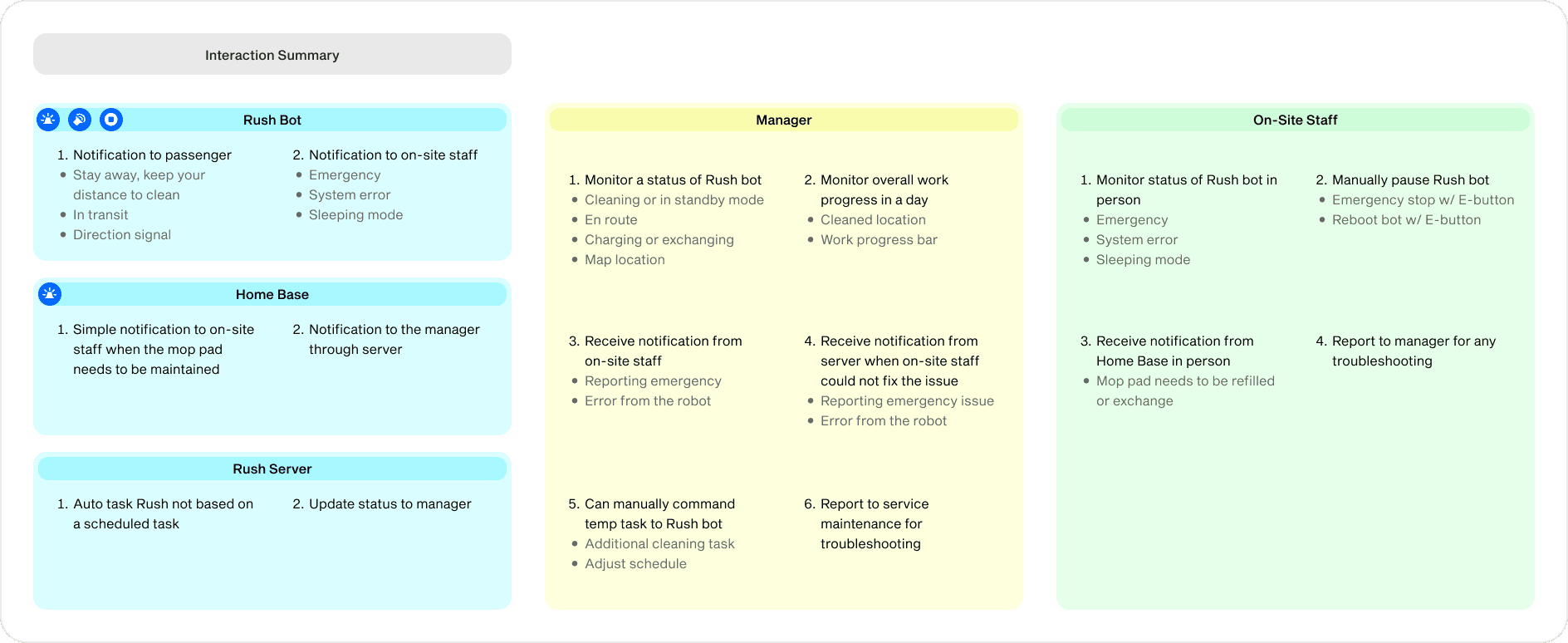
UX Research, Interaction Design, System Diagram,
Form Development, Prototyping
Recognition
Part of a R&D team consisting of 2 ID designers,1 project manager, and 6 developers.
Duration
5 month, Jun-Nov 2021



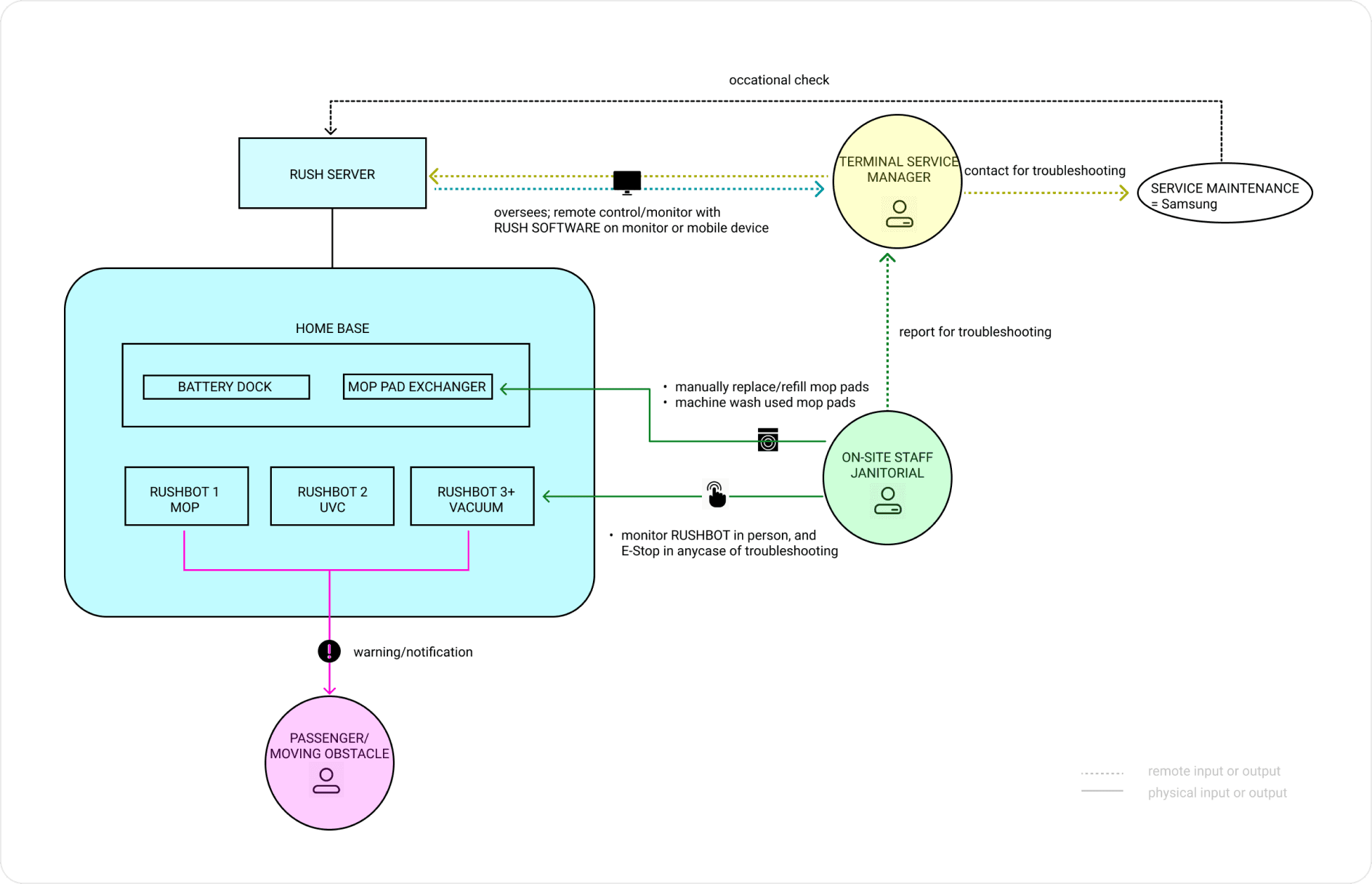
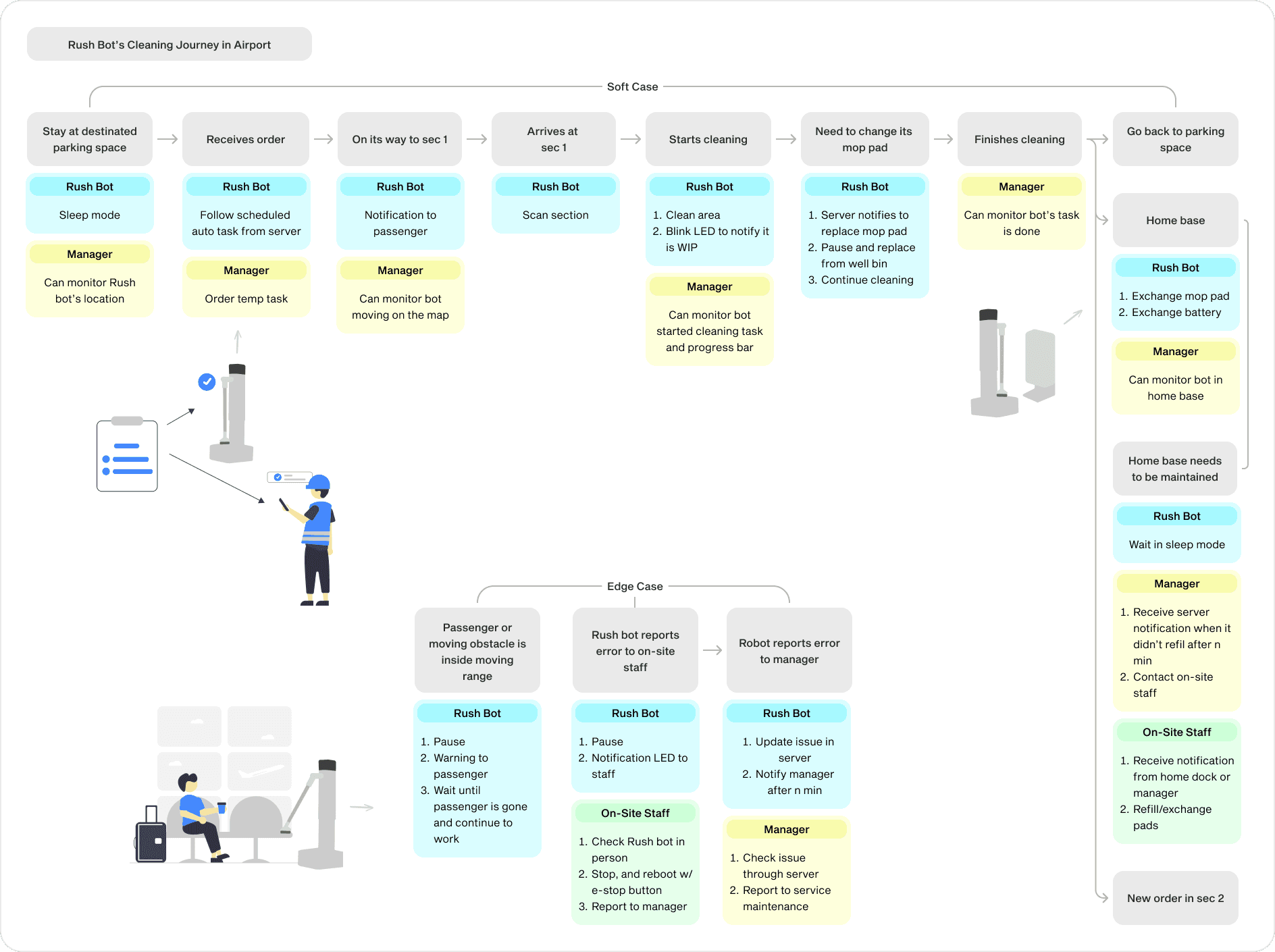
The robot's self-maintenance system allows it to swap out a wet, used mop for a clean one, interfacing seamlessly with the base station and requiring minimal human intervention.
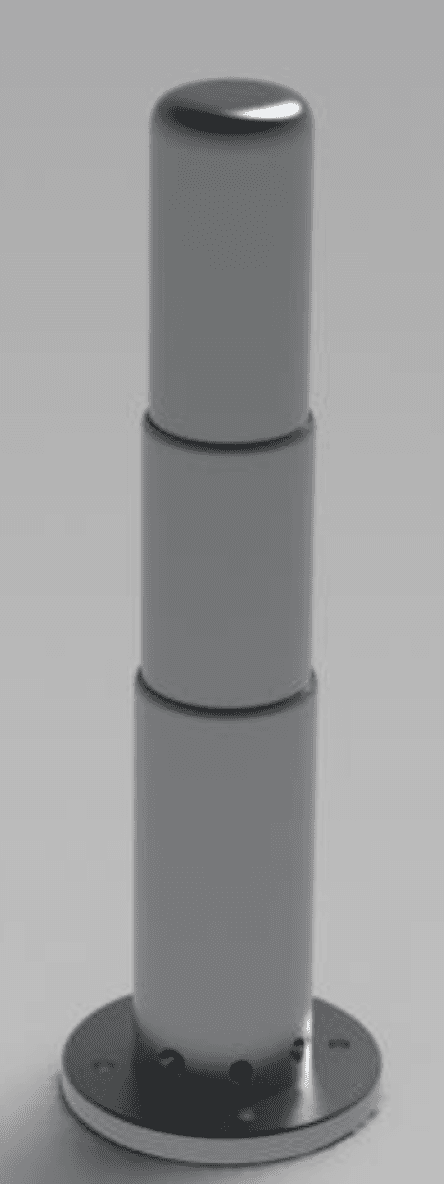
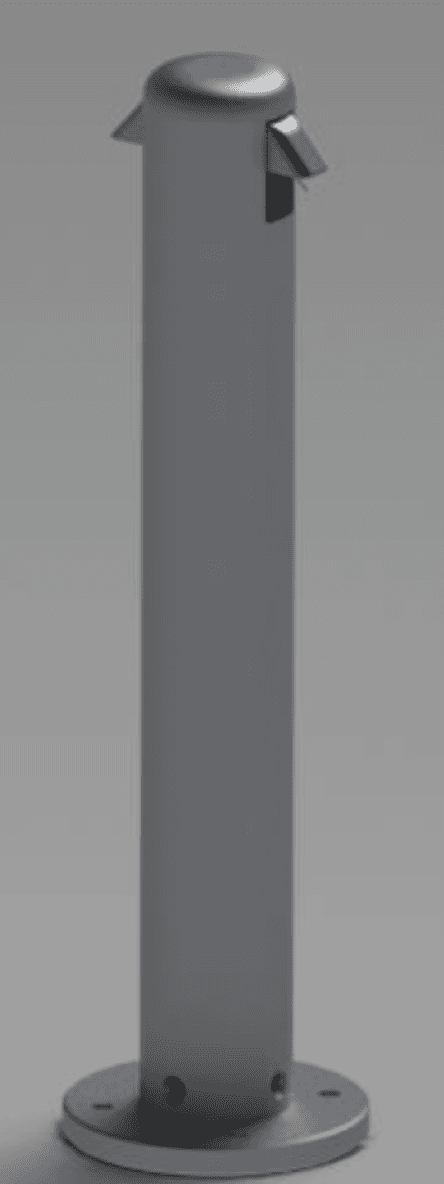
Used mop remover
New mop refiller


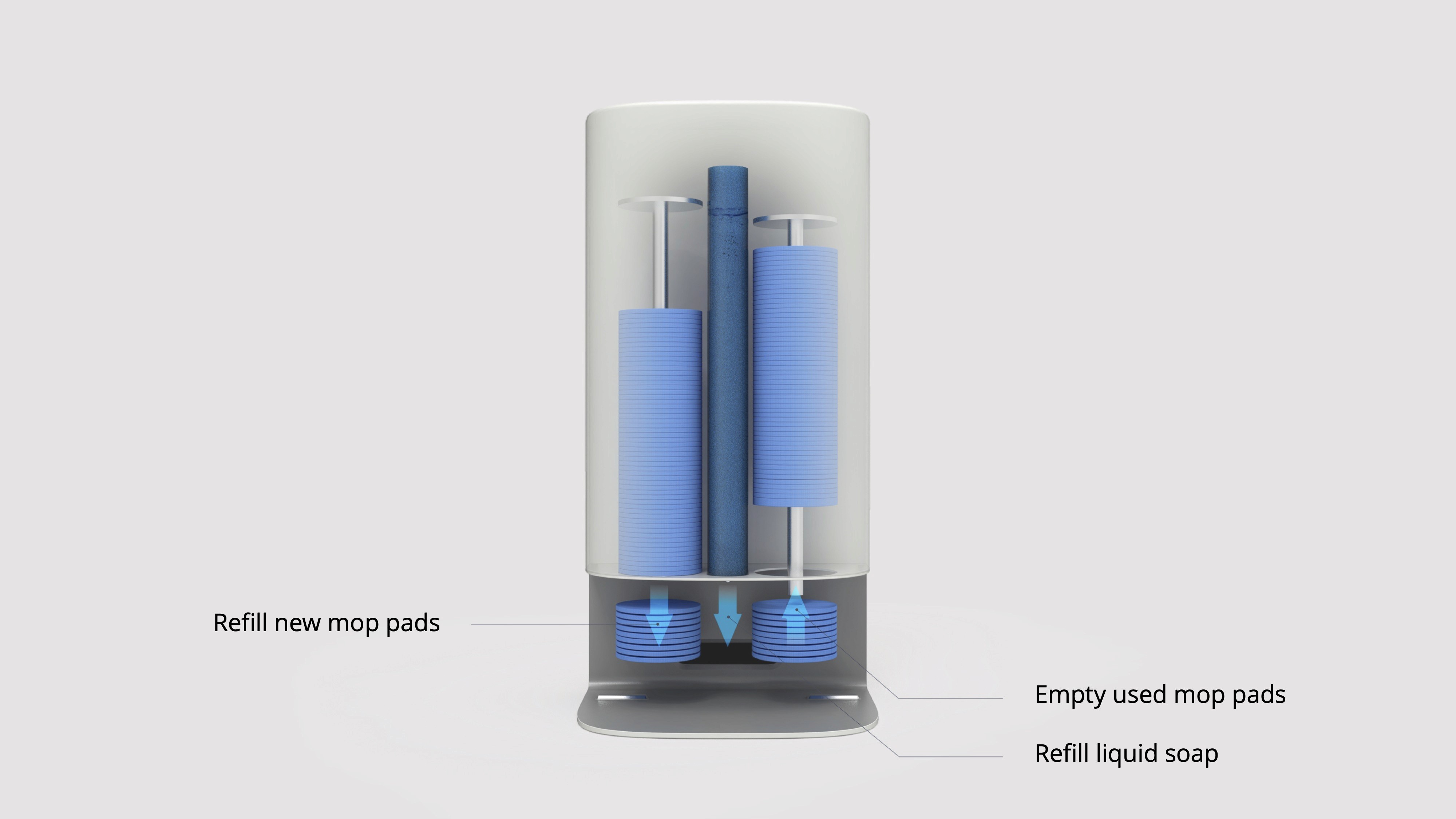
Refill new mop pads
Empty used mop pads
Refill liquid soap
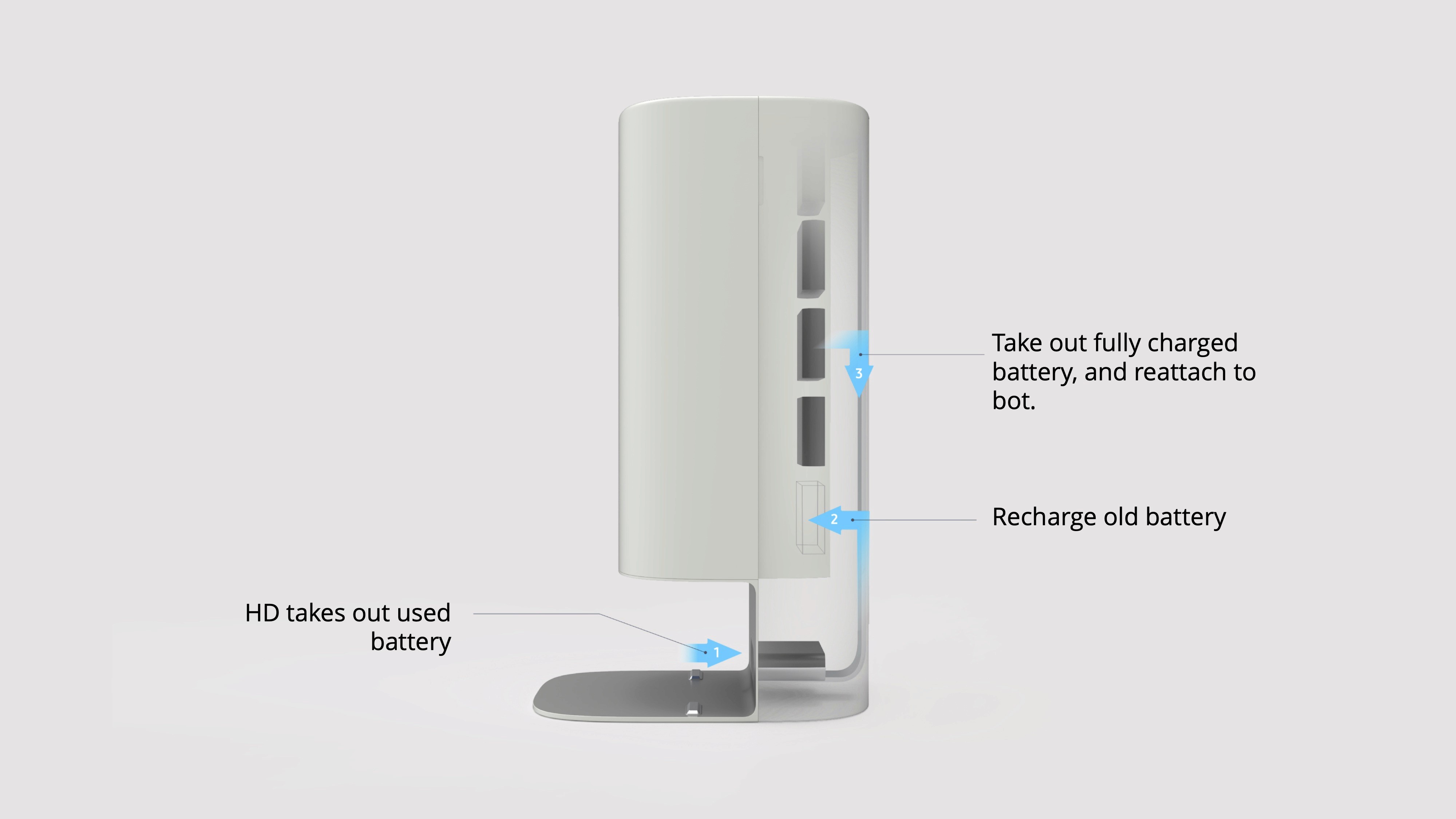
Home dock takes out used battery
Take out the fully charged battery and reattach it to the robot
Recharge old battery
Docking stations for cleaning and exchanging end effectors and cleaning solution.
Docking stations for charging and exchanging batteries for 24/7 robot operation.
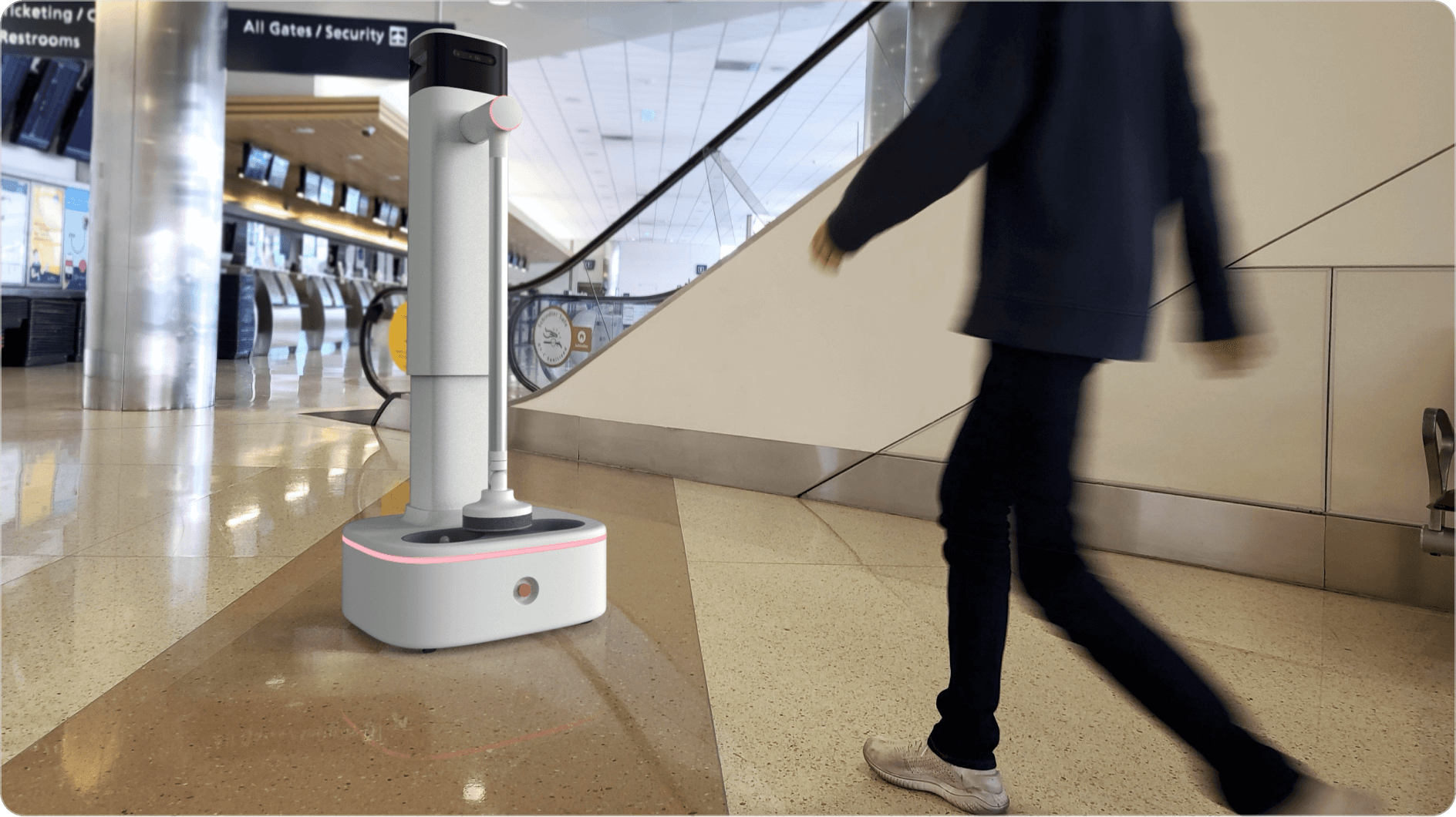
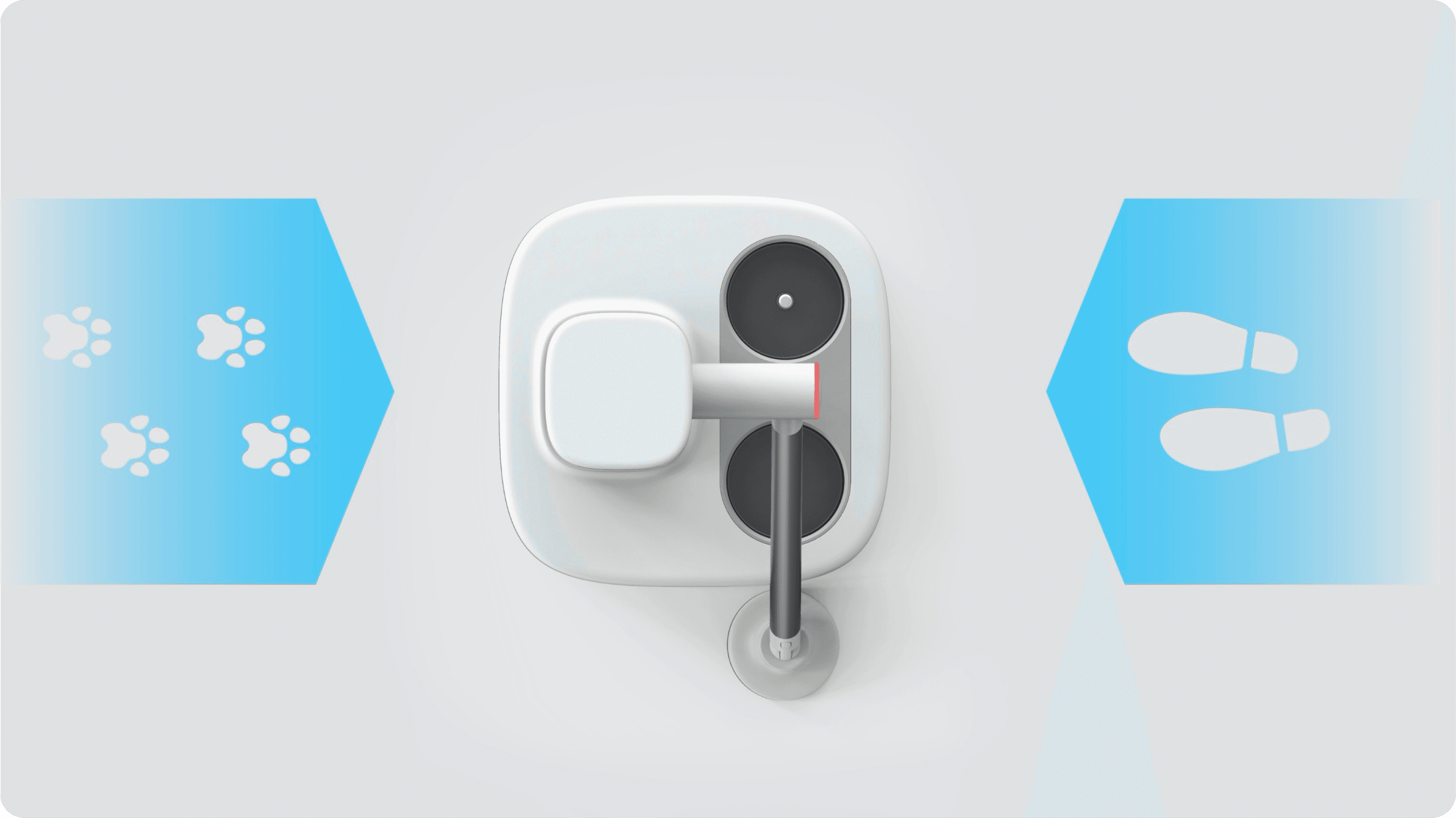
Safe navigation through autonomous movement with the ability to pause upon detecting objects.

View Full Process